在汽车产业加速向智能化、网联化、电动化、共享化转型的今天,汽车网络技术已成为驱动这场深刻变革的核心引擎。它不仅是实现高级驾驶辅助系统(ADAS)、自动驾驶、智能座舱、车路协同等功能的基础,更是构建未来智慧交通生态系统、保障行车安全与提升用户体验的关键。本文旨在探讨汽车网络技术的研究热点、核心挑战及其开发现状与趋势。
一、 汽车网络技术的研究范畴与核心架构
汽车网络技术的研究范围已从传统的车载网络(In-Vehicle Networks, IVN)扩展至车与外界的一切交互(Vehicle-to-Everything, V2X),形成了内外协同的一体化网络体系。
- 车载网络(IVN):这是汽车的“神经系统”,负责连接车内数以百计的电子控制单元(ECU)、传感器和执行器。其研究重点在于:
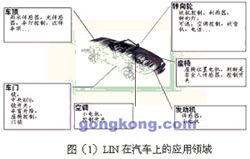
- 总线技术演进:从经典的CAN(控制器局域网)、LIN(本地互联网络)、FlexRay,到如今为满足高带宽、低延迟需求而兴起的车载以太网(如10BASE-T1S, 100BASE-T1, 1000BASE-T1)。车载以太网凭借其高带宽、标准化协议栈和灵活性,正逐渐成为下一代E/E架构(如域控制器、中央计算架构)的骨干网络。
- 实时性与确定性:确保关键信号(如刹车、转向)的传输延迟和抖动在严格限定范围内,这对自动驾驶的安全性至关重要。时间敏感网络(TSN)技术被引入车载以太网,旨在提供有界低延迟和极高可靠性的数据传输。
- 安全与安全:随着车辆互联程度加深,网络安全(防止黑客攻击)和功能安全(确保系统失效时仍处于安全状态)的深度融合(即“安全一体化”)成为研究核心。包括入侵检测与防御系统、安全启动、硬件安全模块(HSM)的应用等。
- 车联万物(V2X)网络:这是汽车的“感官延伸”,使车辆能够与周围环境(其他车辆、行人、路侧基础设施、网络云平台)进行信息交换。其研究围绕两大技术路径展开:
- 基于蜂窝网络的C-V2X:包括LTE-V2X和更先进的5G NR-V2X。5G以其超低时延(可低至1ms)、超高可靠性和大连接特性,为实时协同感知、远程驾驶等高阶应用提供了可能。研究热点包括网络切片、边缘计算(MEC)与V2X的结合,以降低时延、减轻核心网压力。
- 基于专用短程通信的DSRC(IEEE 802.11p):这是一项相对成熟的技术,但在与C-V2X的路线竞争中,其产业生态和发展势头已逐渐被后者超越。
二、 当前开发面临的主要挑战
- 复杂性管理:现代汽车软件代码量已达数亿行,ECU数量过百,网络拓扑复杂。如何设计可扩展、易维护的软硬件架构(如SOA面向服务架构在汽车上的应用)是巨大挑战。
- 标准与协议的统一:车载网络存在多种历史协议,新旧技术共存。V2X领域虽有3GPP等组织推动C-V2X标准,但全球范围内的频谱分配、互操作性测试、跨行业标准统一仍需时日。
- 数据安全与隐私保护:车辆产生和接收的海量数据(位置、驾驶习惯、车况等)面临被窃取、篡改和滥用的风险。开发端到端的加密、匿名化、数据主权管理技术是当务之急。
- 成本与产业化:先进网络技术(如支持TSN的以太网交换机、5G车载模组)的初期成本较高,需要大规模量产和应用来摊薄。整个产业链(芯片、模组、整车、测试、运营)的成熟协同需要时间。
三、 技术发展趋势与开发方向
- 软件定义汽车与中央集中式架构:未来的汽车E/E架构正从分布式向域集中式,最终向车辆中央计算机+区域控制器的架构演进。网络将演变为以高速车载以太网为骨干、区域网关进行协议转换的简化、扁平化拓扑,这要求网络具备极高的带宽和灵活的服务配置能力。
- AI与网络技术的融合:利用人工智能(特别是机器学习)进行网络流量预测、异常行为检测(安全攻击)、动态资源分配和网络性能优化,实现网络的自主管理与自我修复。
- 云-边-端协同计算:车辆本地计算、道路边缘计算和云端计算将深度融合。网络技术需要无缝支持计算任务的卸载与协同,例如,将非实时的大模型训练放在云端,将高实时性的感知融合放在车端或边缘服务器。
- 高精度定位与通信感知一体化:未来5G-Advanced和6G技术将探索通信与感知的融合,使得无线信号不仅能传递信息,还能感知车辆的精确位置、速度乃至周围环境的细微变化,为自动驾驶提供超越视觉的冗余感知层。
汽车网络技术的研究与开发,正处于一个从封闭走向开放、从附属功能走向核心战略的转折点。它已不再是简单的连接工具,而是决定汽车智能化上限、重塑产业价值链的基础设施。应对挑战、把握趋势,需要主机厂、零部件供应商、芯片厂商、通信运营商、科技公司以及标准制定机构、监管部门的深度跨界合作。唯有如此,才能共同编织一张安全、高效、智能的汽车网络,真正驱动人类出行方式的未来变革。